通过FreeRTOS官网资料,已经可以很好的使用FreeRTOS了,再深入的理解就需要深入到源码层,接下来就阅读源码,FreeRTOS版本v9.0.0,平台为ARM Cortex-M4,编译工具为ARM MDK。
FreeRTOS需要关注的源码:
//核心代码
list.c
task.c
queue.c
//平台相关,STM32(ARM Cortex-M4)
port.c
//已经分析过,Memory Management相关
heap_x.c
//非核心代码
event_groups.c
timers.c
croutine.c
List
FreeRTOS核心数据结构List,源码查看list.c,List以及ListItem数据结构如下:
/*
* Definition of the only type of object that a list can contain.
*/
struct xLIST_ITEM
{
listFIRST_LIST_ITEM_INTEGRITY_CHECK_VALUE
configLIST_VOLATILE TickType_t xItemValue;
struct xLIST_ITEM * configLIST_VOLATILE pxNext;
struct xLIST_ITEM * configLIST_VOLATILE pxPrevious;
void * pvOwner;
void * configLIST_VOLATILE pvContainer;
listSECOND_LIST_ITEM_INTEGRITY_CHECK_VALUE
};
typedef struct xLIST_ITEM ListItem_t; /* For some reason lint wants this as two separate definitions. */
/*
* Definition of the type of queue used by the scheduler.
*/
typedef struct xLIST
{
listFIRST_LIST_INTEGRITY_CHECK_VALUE
configLIST_VOLATILE UBaseType_t uxNumberOfItems;
ListItem_t * configLIST_VOLATILE pxIndex;
MiniListItem_t xListEnd;
listSECOND_LIST_INTEGRITY_CHECK_VALUE
} List_t;
通过list.c源码的阅读,可以看出这是一个双向链表结构,图中的List表示这个双向链表,而ListItem就是双向链表里的节点,这些节点根据xItemValue的值的大小做了排序,如下图所示:
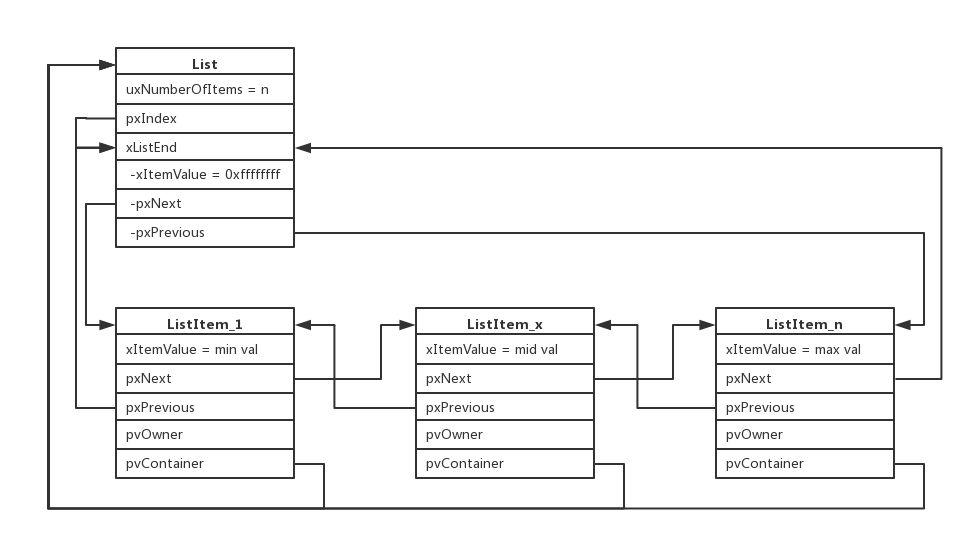
继续阅读源码,就能更深入的理解为什么这么定义数据结构,以及实际是如何使用的。
Tasks
task创建函数xTaskCreate()
BaseType_t xTaskCreate(...)
{
//任务控制块TCB
TCB_t *pxNewTCB;
...
//分配堆内存给newTask的TCB和stack,注意portSTACK_GROWTH
//初始化stack
pxNewTCB->pxStack = pxStack;
...
//newTask初始化
prvInitialiseNewTask(...);
//将task的TCB加入到Ready Tasks List
prvAddNewTaskToReadyList(pxNewTCB);
...
}
这里有一个数据结构TCB,这个数据结构里面定义了所有与task相关的成员,数据结构比较大,暂时先不做过多说明,继续阅读源码,在接下来的源码中剖析TCB成员,以及前面的List如何使用。
static void prvInitialiseNewTask(...)
{
...
//如果启用Stack Overflow检查
//则将stack初始化为特定值tskSTACK_FILL_BYTE
( void ) memset( pxNewTCB->pxStack, ( int ) tskSTACK_FILL_BYTE, ( size_t ) ulStackDepth * sizeof( StackType_t ) );
...
//局部变量,先计算出stack的栈顶指针 pxTopOfStack
pxTopOfStack = pxNewTCB->pxStack + ( ulStackDepth - ( uint32_t ) 1 );
//地址对齐操作,stack操作更快
pxTopOfStack = ( StackType_t * ) ( ( ( portPOINTER_SIZE_TYPE ) pxTopOfStack ) & ( ~( ( portPOINTER_SIZE_TYPE ) portBYTE_ALIGNMENT_MASK ) ) );
...
//保存pxNewTCB->pcTaskName
...
//保存task优先级
pxNewTCB->uxPriority = uxPriority;
#if ( configUSE_MUTEXES == 1 )
{
//Mutex有优先级继承,这里保存task原始的优先级
pxNewTCB->uxBasePriority = uxPriority;
pxNewTCB->uxMutexesHeld = 0;
}
#endif /* configUSE_MUTEXES */
//ListItem_t初始化,状态与事件ListItem
//Task在Ready/Blocked/Suspended某个状态时,此ListItem_t会挂到相应的List
vListInitialiseItem( &( pxNewTCB->xStateListItem ) );
//task相关的某个Event List会指向这个ListItem_t,如Queue满了而阻塞,将其挂接到等待入队的List
vListInitialiseItem( &( pxNewTCB->xEventListItem ) );
//ListItem_t->pvOwener指向此task的TCB
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xStateListItem ), pxNewTCB );
//设置ListItem_t->xItemValue为优先级取反
//逻辑优先级是数字越大优先级越高,存储的时候取反,数字越小优先级越高
//配合前面List数据结构, 按照xItemValue大小排序,那么双链表首节点都是优先级最大的节点
listSET_LIST_ITEM_VALUE( &( pxNewTCB->xEventListItem ), ( TickType_t ) configMAX_PRIORITIES - ( TickType_t ) uxPriority );
//ListItem_t->pvOwener指向此task的TCB
listSET_LIST_ITEM_OWNER( &( pxNewTCB->xEventListItem ), pxNewTCB );
...
//task notification相关初始化
#if ( configUSE_TASK_NOTIFICATIONS == 1 )
{
pxNewTCB->ulNotifiedValue = 0;
pxNewTCB->ucNotifyState = taskNOT_WAITING_NOTIFICATION;
}
#endif
...
//初始化stack,详见此函数解读,可了解stack保存内容及顺序
pxNewTCB->pxTopOfStack = pxPortInitialiseStack( pxTopOfStack, pxTaskCode, pvParameters );
...
}
static void prvAddNewTaskToReadyList( TCB_t *pxNewTCB )
{
//进入临界区
taskENTER_CRITICAL();
{
uxCurrentNumberOfTasks++;
if( pxCurrentTCB == NULL )
{
//没有任务或者其他任务都在Suspend状态
//全局变量pxCurrentTCB指向此task TCB,永远指向当前运行的task TCB
pxCurrentTCB = pxNewTCB;
if( uxCurrentNumberOfTasks == ( UBaseType_t ) 1 )
{
//第一个任务,初始化Task List,详见对此函数的解读
prvInitialiseTaskLists();
}
}
else
{
//如果task调度还未开始,pxCurrentTCB指向优先级最大的那个task TCB
if( xSchedulerRunning == pdFALSE )
{
if( pxCurrentTCB->uxPriority <= pxNewTCB->uxPriority )
{
pxCurrentTCB = pxNewTCB;
}
}
}
uxTaskNumber++;
#if ( configUSE_TRACE_FACILITY == 1 )
{
/* Add a counter into the TCB for tracing only. */
pxNewTCB->uxTCBNumber = uxTaskNumber;
}
#endif /* configUSE_TRACE_FACILITY */
//将此task TCB插入到pxReadyTasksLists相应优先级List尾部
prvAddTaskToReadyList( pxNewTCB );
...
}
//退出临界区
taskEXIT_CRITICAL();
//如果此时task开始调度,如果新task优先级更高,则立即发起一次调度
if( xSchedulerRunning != pdFALSE )
{
if( pxCurrentTCB->uxPriority < pxNewTCB->uxPriority )
{
//强制产生一次调度,发起PendSV中断
taskYIELD_IF_USING_PREEMPTION();
}
}
}
StackType_t *pxPortInitialiseStack(StackType_t *pxTopOfStack, TaskFunction_t pxCode, void *pvParameters)
{
pxTopOfStack--;
//状态寄存器入栈
*pxTopOfStack = portINITIAL_XPSR; /* xPSR */
pxTopOfStack--;
//PC指针入栈
*pxTopOfStack = ( ( StackType_t ) pxCode ) & portSTART_ADDRESS_MASK; /* PC */
pxTopOfStack--;
//链接返回寄存器入栈,保存返回地址
*pxTopOfStack = ( StackType_t ) prvTaskExitError; /* LR */
/* Save code space by skipping register initialisation. */
pxTopOfStack -= 5; /* R12, R3, R2 and R1. */
*pxTopOfStack = ( StackType_t ) pvParameters; /* R0 */
/* A save method is being used that requires each task to maintain its own exec return value. */
pxTopOfStack--;
*pxTopOfStack = portINITIAL_EXEC_RETURN; //返回值
pxTopOfStack -= 8; /* R11, R10, R9, R8, R7, R6, R5 and R4. */
return pxTopOfStack;
}
static void prvInitialiseTaskLists( void )
{
UBaseType_t uxPriority;
//每个优先级创建一个Ready List,组成Ready List数组
for( uxPriority = ( UBaseType_t ) 0U; uxPriority < ( UBaseType_t ) configMAX_PRIORITIES; uxPriority++ )
{
vListInitialise( &( pxReadyTasksLists[ uxPriority ] ) );
}
//创建Delay Task List
vListInitialise( &xDelayedTaskList1 );
vListInitialise( &xDelayedTaskList2 );
//创建Pending Ready List
vListInitialise( &xPendingReadyList );
#if ( INCLUDE_vTaskDelete == 1 )
{
vListInitialise( &xTasksWaitingTermination );
}
#endif /* INCLUDE_vTaskDelete */
#if ( INCLUDE_vTaskSuspend == 1 )
{
//创建Suspend Task List
vListInitialise( &xSuspendedTaskList );
}
#endif /* INCLUDE_vTaskSuspend */
/* Start with pxDelayedTaskList using list1 and the pxOverflowDelayedTaskList using list2. */
pxDelayedTaskList = &xDelayedTaskList1;
pxOverflowDelayedTaskList = &xDelayedTaskList2;
}
Task创建的过程已经基本清楚了,接着再看task调度过程,通过函数vTaskStartScheduler()启动调度:
void vTaskStartScheduler( void )
{
//先创建Idle Task
xReturn = xTaskCreate(prvIdleTask, ...
...
//如果用到Timers,还要创建Timers的task
#if ( configUSE_TIMERS == 1 )
{
if( xReturn == pdPASS )
{
xReturn = xTimerCreateTimerTask();
}
}
#endif /* configUSE_TIMERS */
if( xReturn == pdPASS )
{
portDISABLE_INTERRUPTS();
xNextTaskUnblockTime = portMAX_DELAY;
//调度开始标志置位
xSchedulerRunning = pdTRUE;
//RTOS Tick初始化为0
xTickCount = ( TickType_t ) 0U;
//设置systick产生RTOS需要的Tick中断,与平台移植相关,详见分析
xPortStartScheduler();
...
}
...
}
BaseType_t xPortStartScheduler( void )
{
...
//将PendSV和SysTick中断优先级设置为最低,与RTOS运行优先级相同
portNVIC_SYSPRI2_REG |= portNVIC_PENDSV_PRI;
portNVIC_SYSPRI2_REG |= portNVIC_SYSTICK_PRI;
//启动Systick
vPortSetupTimerInterrupt();
//初始化嵌套计数为0
uxCriticalNesting = 0;
//浮点运算协处理器相关配置
prvEnableVFP();
*( portFPCCR ) |= portASPEN_AND_LSPEN_BITS;
//启动第一个task
prvStartFirstTask();
//不会执行到这里!!!
return 0;
}
void vPortSetupTimerInterrupt( void )
{
#if configUSE_TICKLESS_IDLE == 1
{
//计算1Tick=多少Systick时钟频率计数
ulTimerCountsForOneTick = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ );
//低功耗每次关闭Systick的最大Tick数,更好的理解需要看前面Tickless模式低功耗的解读
xMaximumPossibleSuppressedTicks = portMAX_24_BIT_NUMBER / ulTimerCountsForOneTick;
//Cpu Cycles的补偿值,还是应用在Tickless模式低功耗
ulStoppedTimerCompensation = portMISSED_COUNTS_FACTOR / ( configCPU_CLOCK_HZ / configSYSTICK_CLOCK_HZ );
}
#endif /* configUSE_TICKLESS_IDLE */
//Systick tick中断加载值及使能,期望的频率是由宏configTICK_RATE_HZ定义(1ms中断)
portNVIC_SYSTICK_LOAD_REG = ( configSYSTICK_CLOCK_HZ / configTICK_RATE_HZ ) - 1UL;
portNVIC_SYSTICK_CTRL_REG = ( portNVIC_SYSTICK_CLK_BIT | portNVIC_SYSTICK_INT_BIT | portNVIC_SYSTICK_ENABLE_BIT );
}
__asm void prvStartFirstTask( void )
{
PRESERVE8
/* Use the NVIC offset register to locate the stack. */
//0xE000ED08是Cortex-M4向量表偏移量寄存器(VTOR)的地址
//起始地址存储着MSP即主堆栈指针
ldr r0, =0xE000ED08
ldr r0, [r0]
ldr r0, [r0]
/* Set the msp back to the start of the stack. */
msr msp, r0
/* Globally enable interrupts. */
//使能全局中断
cpsie i
cpsie f
dsb
isb
/* Call SVC to start the first task. */
svc 0 //触发SVC中断,SVC中断处理函数启动第一个task
nop
nop
}
//SVC中断处理函数
__asm void vPortSVCHandler( void )
{
PRESERVE8
ldr r3, =pxCurrentTCB //将pxCurrentTCB的值作为地址赋值给r3
ldr r1, [r3] //将pxCurrentTCB指针指向的值,当前task TCB的地址赋值给r1
ldr r0, [r1] //取得当前要运行的task栈顶指针,并赋值给r0,由此理解为什么TCB数据结构的第一项必须设计为栈顶指针
ldmia r0!, {r4-r11} //寄存器r4~r11出栈
msr psp, r0 //栈顶指针赋给线程堆栈指针PSP
isb
mov r0, #0
msr basepri, r0
bx r14 //跳转执行目标task
}
三个特殊的中断及中断处理函数,Systick/SVC/PendSV,这也是在移植FreeRTOS时需要特别注意的地方,Systick产生RTOS需要的Tick中断,其中断处理函数与RTOS密切相关,SVC如上所示启动Task,PendSV用于task调度切换,Systick/PendSV配置成了最低优先级,在中断抢占的前提下,PendSV被抢占但是在处理完高优先级的任务后,依然会进入中断处理函数处理,这样不会打断高优先级的任务,也能完成任务的调度切换。
Task调度机制启动后,任务就开始执行,FreeRTOS里面的任务切换一般在PendSV中断处理函数里面进行,而PendSV中断则是由Systick中断中触发的,也就是系统Tick中断中判断是否有任务需要切换,需要则产生PendSV中断,然后再PendSV中断处理函数里面执行切换操作。另外,在xCreateTask()过程分析中(Idle Task里面也有这样的操作),我们也见到了直接切换的方式taskYIELD(),产生PendSV中断。总结2种方式:
//第一种,直接产生PendSV中断
portYIELD或者portYIELD_FROM_ISR
#define portYIELD()
{
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;
__dsb( portSY_FULL_READ_WRITE );
__isb( portSY_FULL_READ_WRITE );
}
//第二种,判断是否有task需要切换,然后再决定是否产生PendSV中断
void xPortSysTickHandler( void )
{
vPortRaiseBASEPRI();
{
if(xTaskIncrementTick() != pdFALSE)
{
portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT;
}
}
vPortClearBASEPRIFromISR();
}
具体的切换过程即为PendSV的中断处理函数,汇编+C实现,还是有一些ARM Cortex-M4相关的部分放置在port.c中,而且这部分C语言也很难实现。
__asm void xPortPendSVHandler( void )
{
extern uxCriticalNesting;
extern pxCurrentTCB;
extern vTaskSwitchContext;
PRESERVE8
//先进行当前task的入栈操作,task的栈指针寄存器使用psp
//中断服务程序处理之前,自动入栈xPSR、PC、LR、R12、R3~R0
mrs r0, psp
isb
/* Get the location of the current TCB. */
ldr r3, =pxCurrentTCB
ldr r2, [r3]
/* Is the task using the FPU context? If so, push high vfp registers. */
//FPU入栈
tst r14, #0x10
it eq
vstmdbeq r0!, {s16-s31}
/* Save the core registers. */
//其他寄存器入栈
stmdb r0!, {r4-r11, r14}
/* Save the new top of stack into the first member of the TCB. */
//更新最新的栈指针到当前task TCB首地址(即第一项保存当前栈指针)
str r0, [r2]
//R3入栈,后面调用vTaskSwitchContext(),此函数从ReadyList里取出即将运行的task TCB赋值给pxCurrentTCB
//R3保存了pxCurrentTCB地址
stmdb sp!, {r3}
mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY
msr basepri, r0
dsb
isb
bl vTaskSwitchContext
mov r0, #0
msr basepri, r0
ldmia sp!, {r3}
//恢复R3,此时的pxCurrentTCB已经指向了即将运行的task TCB
/* The first item in pxCurrentTCB is the task top of stack. */
//取得task TCB的栈指针
ldr r1, [r3]
ldr r0, [r1]
/* Pop the core registers. */
//部分寄存器出栈
ldmia r0!, {r4-r11, r14}
/* Is the task using the FPU context? If so, pop the high vfp registers too. */
//FPU出栈
tst r14, #0x10
it eq
vldmiaeq r0!, {s16-s31}
//将task的当前栈指针赋值给psp
msr psp, r0
isb
bx r14 //跳转至即将运行的task运行,R0~R3、R12、LR、PC、xPSR自动出栈
}
Cortex-M4提供了2个栈指针MSP和PSP,PSP就是MCU正常运行时使用的栈指针,因此一般PSP都指向了某个task的栈,而MSP在异常情况下使用,MSP一般指向的是整个系统的栈,两个栈指针寄存器分工不同。通过上面的过程,也可以看到出栈入栈的顺序:
| | Stack
|-------------|
| xPSR |
| PC |
| LR |
| R12 |
| R3 |
| ... |
| R0 |
| R14 |
| R11 |
| ... |
| R4 | <-PSP
|-------------|
| |
Task相关的创建、调度及切换的源码基本读了一遍,还有些细节暂放一下,继续阅读。
Queue
队列应用于任务间通讯,可以在任务与任务之间,中断服务程序与任务之间传递消息,消息是通过Copy进队列的方式传递的,队列维护消息体本身,多了一次Copy而不是使用引用,对消息体本身的安全性和完整性有益。另外,Semaphore/Mutex也是借助Queue实现的,需要对Queue进一步的理解。
队列的数据结构定义为xQUEUE,此结构较大,暂时不对其细致的理解,后面阅读源码过程中深入理解,再看队列创建函数xQueueCreate(),实际是xQueueGenericCreate()函数。
QueueHandle_t xQueueGenericCreate(...)
{
//Queue分配堆内存
//初始化Queue
prvInitialiseNewQueue(...);
}
为Queue分配堆内存大小及顺序:Queue_t结构体+队列消息内容占用内存总和。
|-----------------------|
| Queue_t结构体 |
|-----------------------|
| Queue所有队列项 |
|-----------------------|
再看具体的Queue初始化源码:
static void prvInitialiseNewQueue(...)
{
...
//初始化完善Queue_t数据结构的各项
if( uxItemSize == ( UBaseType_t ) 0 )
{
//Mutex时没有队列消息项,直接指向Queue_t首地址
pxNewQueue->pcHead = ( int8_t * ) pxNewQueue;
}
else
{
//队列头指向队列消息项的首地址
pxNewQueue->pcHead = ( int8_t * ) pucQueueStorage;
}
pxNewQueue->uxLength = uxQueueLength;
pxNewQueue->uxItemSize = uxItemSize;
//更多的初始化,继续深入阅读
( void ) xQueueGenericReset(pxNewQueue, pdTRUE);
...
}
BaseType_t xQueueGenericReset(QueueHandle_t xQueue, BaseType_t xNewQueue)
{
...
taskENTER_CRITICAL();
{
//tail指向队列尾
pxQueue->pcTail = pxQueue->pcHead + ( pxQueue->uxLength * pxQueue->uxItemSize );
//当前队列里的队列项个数
pxQueue->uxMessagesWaiting = ( UBaseType_t ) 0U;
//指向下一个可写的队列项,用于队列入队时向队尾添加队列项
pxQueue->pcWriteTo = pxQueue->pcHead;
//指向最后一个队列项,用于队列入队时向队首添加队列项
pxQueue->u.pcReadFrom = pxQueue->pcHead + ( ( pxQueue->uxLength - ( UBaseType_t ) 1U ) * pxQueue->uxItemSize );
//初始化Queue Lock时接收和发送的队列项
pxQueue->cRxLock = queueUNLOCKED;
pxQueue->cTxLock = queueUNLOCKED;
...
//初始化了2个List,记录了等待超时和接收消息的tasks List
vListInitialise( &( pxQueue->xTasksWaitingToSend ) );
vListInitialise( &( pxQueue->xTasksWaitingToReceive ) );
}
taskEXIT_CRITICAL();
return pdPASS;
}
初始化完成后的Queue模型如下图所示:
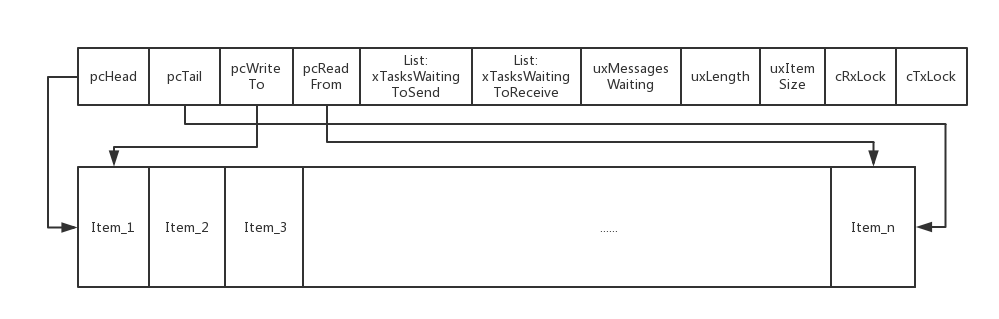
前面是Queue_t结构,后面紧跟着的Item_x为实际队列项(队列消息体),Queue_t中的两个List存储的是与此队列相关联的tasks。继续看xQueueSend()也就是xQueueGenericSend()源码
BaseType_t xQueueGenericSend(...)
{
...
for(;;)
{
taskENTER_CRITICAL();
{
//检查队列是否满,如果是overwrite方式直接入队
if( ( pxQueue->uxMessagesWaiting < pxQueue->uxLength ) || ( xCopyPosition == queueOVERWRITE ) )
{
//三种入队方式:队尾,队首和overwrite
//特别注意当用作Mutex使用时,返回值可能为True,即需要切换到更高优先级任务,需要执行任务调度
xYieldRequired = prvCopyDataToQueue( pxQueue, pvItemToQueue, xCopyPosition );
...
//先忽略掉Queue Sets的情况
//如果有tasks正在等待接收队列消息
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToReceive ) ) == pdFALSE )
{
//如果有任务在等待队列消息,则将此任务添加进任务Ready List
if( xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToReceive ) ) != pdFALSE )
{
queueYIELD_IF_USING_PREEMPTION();
}
}
else if (xYieldRequired != pdFALSE)
{
//仅用作Mutex时,释放Mutex后调度任务(Mutex有优先级继承)
queueYIELD_IF_USING_PREEMPTION();
}
else
{
}
taskEXIT_CRITICAL();
return pdPASS;
}
else //队列满,且非overwrite方式入队
{
if( xTicksToWait == ( TickType_t ) 0 )
{
//队列满了,而且没有设置超时等待,则直接退出,返回队列满错误
taskEXIT_CRITICAL();
return errQUEUE_FULL;
}
else if( xEntryTimeSet == pdFALSE )
{
//队列满了,而且设置了超时等待,则初始化了一个timeout数据结构
vTaskSetTimeOutState( &xTimeOut );
xEntryTimeSet = pdTRUE;
}
else
{
}
}
}
taskEXIT_CRITICAL();
//退出临界区,此处可能会有任务调度
//全部任务挂起,阻止任务调度
vTaskSuspendAll();
//锁定Queue,将Queue_t里的rxLock和txLock设置为Lock,阻止了任务调度,但是中断处理程序里还是可以对Queue进行操作,因此对Queue上锁
prvLockQueue( pxQueue );
if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) == pdFALSE )
{
//队列等待超时未过期
if( prvIsQueueFull( pxQueue ) != pdFALSE )
{
//队列满
//将当前task加入到等待此队列入队的等待List和延时List
vTaskPlaceOnEventList( &( pxQueue->xTasksWaitingToSend ), xTicksToWait );
//解锁队列
prvUnlockQueue( pxQueue );
//将tasks从PendingReadyList移至ReadyList
if( xTaskResumeAll() == pdFALSE )
{
portYIELD_WITHIN_API();
}
}
else
{
//队列未满
//解锁队列,恢复挂起的所有任务,没有return,继续for循环
prvUnlockQueue( pxQueue );
( void ) xTaskResumeAll();
}
}
else
{
//设置的队列等待超时过期
prvUnlockQueue( pxQueue );
//挂起的tasks全部恢复,返回队列满错误
( void ) xTaskResumeAll();
return errQUEUE_FULL;
}
}
}
队列入队后,如果队列未满,将等待此队列消息的List(xTasksWaitingToReceive)中需要解除阻塞的task从等待消息的List中删除,然后将其添加进任务Ready List中,然后再与当前运行的task的优先级做一下比较,如果优先级更高则产生一次调度。详见函数xTaskRemoveFromEventList()。
如果队列满了,则情况稍微复杂一些,如果队列入队时没有设置阻塞等待时间,即xTicksToWait=0,则直接返回队列满错误;如果设置了阻塞等待时间,而且时间未到,则将当前运行的task加入到等待此队列入队的等待List里(xTasksWaitingToSend),还要将此任务加入到延时List中,可参考函数vTaskPlaceOnEventList(),解锁队列,恢复所有挂起的任务,恢复调度,如果此时有更高优先级的任务Ready,则产生一次任务调度;如果设置了阻塞时间,而且时间到,则解锁Queue,恢复所有挂起的任务,恢复调度,返回队列满错误。
接着再看一下中断处理函数里相关的Queue的操作函数xQueueGenericSendFromISR()
BaseType_t xQueueGenericSendFromISR(...)
{
...
uxSavedInterruptStatus = portSET_INTERRUPT_MASK_FROM_ISR();
{
if( ( pxQueue->uxMessagesWaiting < pxQueue->uxLength ) || ( xCopyPosition == queueOVERWRITE ) )
{
//队列未满或overwrite
//入队,分三种方式:队尾、队首、overwrite
( void ) prvCopyDataToQueue( pxQueue, pvItemToQueue, xCopyPosition );
if( cTxLock == queueUNLOCKED )
{
//如果队列unlock
...
//队列非空
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToReceive ) ) == pdFALSE )
{
//如果有任务在等待队列消息,则将此任务添加进任务Ready List
if( xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToReceive ) ) != pdFALSE )
{
//设置为pdTRUE,则代表需要一次任务切换
if( pxHigherPriorityTaskWoken != NULL )
{
*pxHigherPriorityTaskWoken = pdTRUE;
}
}
}
}
else
{
//如果队列lock,此时不可以操作队列,只有tx锁计数器加1
pxQueue->cTxLock = ( int8_t ) ( cTxLock + 1 );
}
xReturn = pdPASS;
}
else
{
//队列满了,直接返回队列满错误
xReturn = errQUEUE_FULL;
}
}
portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedInterruptStatus );
return xReturn;
}
中断服务程序里的队列入队操作就要简单许多,不同的处理是在队列被锁定后,不再做任何操作了,直接将cTxLock计数器加1,在队列被解锁后,根据计数器的值,依次处理相关的队列项。
再接着看出队函数xQueueReceive(),也就是xQueueGenericReceive(),与入队的操作相反,基本逻辑非常类似。
BaseType_t xQueueGenericReceive(...)
{
...
for( ;; )
{
taskENTER_CRITICAL();
{
const UBaseType_t uxMessagesWaiting = pxQueue->uxMessagesWaiting;
//等待消息队列项非空
if( uxMessagesWaiting > ( UBaseType_t ) 0 )
{
pcOriginalReadPosition = pxQueue->u.pcReadFrom;
//出队操作,不像前面入队那样分三种情况了,出队只有copy操作
prvCopyDataFromQueue( pxQueue, pvBuffer );
if( xJustPeeking == pdFALSE )
{
//需要移除队列消息项,一般情况都采用这种操作,走这个分支
pxQueue->uxMessagesWaiting = uxMessagesWaiting - 1;
#if ( configUSE_MUTEXES == 1 )
{
//Mutex时的操作
if( pxQueue->uxQueueType == queueQUEUE_IS_MUTEX )
{
pxQueue->pxMutexHolder = ( int8_t * ) pvTaskIncrementMutexHeldCount();
}
}
#endif
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToSend ) ) == pdFALSE )
{
//队列等待发送List非空,有task在等待向队列发送消息
//将此任务添加进任务Ready List
if( xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToSend ) ) != pdFALSE )
{
//如果有任务需要调度,产生一次任务调度
queueYIELD_IF_USING_PREEMPTION();
}
}
}
else
{
//不需要移除队列消息项
pxQueue->u.pcReadFrom = pcOriginalReadPosition;
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToReceive ) ) == pdFALSE )
{
if( xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToReceive ) ) != pdFALSE )
{
queueYIELD_IF_USING_PREEMPTION();
}
}
}
taskEXIT_CRITICAL();
return pdPASS;
}
else
{
//等待消息队列项为空
if( xTicksToWait == ( TickType_t ) 0 )
{
//设置等待阻塞超时时间为0,则直接返回队列空错误
taskEXIT_CRITICAL();
return errQUEUE_EMPTY;
}
else if( xEntryTimeSet == pdFALSE )
{
//设置了等待阻塞超时时间,则初始化一个TimeOut数据结构
vTaskSetTimeOutState( &xTimeOut );
xEntryTimeSet = pdTRUE;
}
else
{
}
}
}
taskEXIT_CRITICAL();
//退出临界区,此处可能会有任务调度
//所有任务挂起,阻止任务调度
vTaskSuspendAll();
//Queue锁定,此时可以处理中断,中断处理程序里可能对队列有操作
prvLockQueue( pxQueue );
if( xTaskCheckForTimeOut( &xTimeOut, &xTicksToWait ) == pdFALSE )
{
//等待阻塞超时时间未到
if( prvIsQueueEmpty( pxQueue ) != pdFALSE )
{
//队列未空
#if ( configUSE_MUTEXES == 1 )
{
//Mutex时的操作
if( pxQueue->uxQueueType == queueQUEUE_IS_MUTEX )
{
taskENTER_CRITICAL();
{
vTaskPriorityInherit( ( void * ) pxQueue->pxMutexHolder );
}
taskEXIT_CRITICAL();
}
}
#endif
//将任务加入到等待接收队列消息的List和延时List
vTaskPlaceOnEventList( &( pxQueue->xTasksWaitingToReceive ), xTicksToWait );
//Queue解锁
prvUnlockQueue( pxQueue );
//挂起的任务全部恢复,并启动调度
if( xTaskResumeAll() == pdFALSE )
{
//如果有调度需要,产生一次调度
portYIELD_WITHIN_API();
}
}
esle
{
//队列为非空
prvUnlockQueue( pxQueue );
( void ) xTaskResumeAll();
}
}
else
{
//等待阻塞超时时间到
//Queue解锁,恢复挂起的任务,开启任务调度
prvUnlockQueue( pxQueue );
( void ) xTaskResumeAll();
if( prvIsQueueEmpty( pxQueue ) != pdFALSE )
{
//队列未空,返回队列空错误
return errQUEUE_EMPTY;
}
}
}
}
另一个中断处理程序里的函数xQueueReceiveFromISR()也与相应的入队时类似。
BaseType_t xQueueReceiveFromISR(...)
{
uxSavedInterruptStatus = portSET_INTERRUPT_MASK_FROM_ISR();
{
const UBaseType_t uxMessagesWaiting = pxQueue->uxMessagesWaiting;
if( uxMessagesWaiting > ( UBaseType_t ) 0 )
{
...
//将队列消息项copy出队列
prvCopyDataFromQueue( pxQueue, pvBuffer );
pxQueue->uxMessagesWaiting = uxMessagesWaiting - 1;
if( cRxLock == queueUNLOCKED )
{
//队列unlock
if( listLIST_IS_EMPTY( &( pxQueue->xTasksWaitingToSend ) ) == pdFALSE )
{
//有task等待向队列发送消息,将此task从等待发送队列的List中移除,并加入到任务的Ready List里
if( xTaskRemoveFromEventList( &( pxQueue->xTasksWaitingToSend ) ) != pdFALSE )
{
if( pxHigherPriorityTaskWoken != NULL )
{
//有任务调度,将任务调度标志置位pdTRUE
*pxHigherPriorityTaskWoken = pdTRUE;
}
}
}
}
else
{
//队列lock,队列不进行操作,将rxLock计数器加1,后面队列解锁后再依次做相应的处理
pxQueue->cRxLock = ( int8_t ) ( cRxLock + 1 );
}
}
else
{
//队列里没有接收的消息,直接返回失败错误
xReturn = pdFAIL;
}
}
portCLEAR_INTERRUPT_MASK_FROM_ISR( uxSavedInterruptStatus );
return xReturn;
}
Semaphore & Mutex
信号量和互斥量也是基于Queue实现的,有了前面阅读Queue相关源码的基础,继续阅读这两者就能更好的理解。
Binary Semaphore创建函数xSemaphoreCreateBinary(),从下面的宏定义看出创建了一个type为queueQUEUE_TYPE_BINARY_SEMAPHORE,队列size为1,队列项size为0的队列。
#define xSemaphoreCreateBinary()
xQueueGenericCreate( ( UBaseType_t ) 1, semSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_BINARY_SEMAPHORE )
Counting Semaphore创建函数xSemaphoreCreateCounting(),由下面的代码可以看出是创建一个type为queueQUEUE_TYPE_COUNTING_SEMAPHORE,队列size为创建时的参数uxMaxCount(计数最大值),队列项size为0的队列。另一个初始化时的参数uxInitialCount是信号量的初始值(即为队列里消息项的个数)。
#define xSemaphoreCreateCounting( uxMaxCount, uxInitialCount )
xQueueCreateCountingSemaphore( ( uxMaxCount ), ( uxInitialCount ) )
QueueHandle_t xQueueCreateCountingSemaphore(...)
{
QueueHandle_t xHandle;
xHandle = xQueueGenericCreate( uxMaxCount, queueSEMAPHORE_QUEUE_ITEM_LENGTH, queueQUEUE_TYPE_COUNTING_SEMAPHORE );
if( xHandle != NULL )
{
( ( Queue_t * ) xHandle )->uxMessagesWaiting = uxInitialCount;
}
return xHandle;
}
Mutex的创建函数xSemaphoreCreateMutex(),由下面的代码可以看出,创建了一个type为queueQUEUE_TYPE_MUTEX,队列size为1,队列项size为0的队列。
#define xSemaphoreCreateMutex() xQueueCreateMutex( queueQUEUE_TYPE_MUTEX )
QueueHandle_t xQueueCreateMutex( const uint8_t ucQueueType )
{
Queue_t *pxNewQueue;
const UBaseType_t uxMutexLength = ( UBaseType_t ) 1, uxMutexSize = ( UBaseType_t ) 0;
pxNewQueue = ( Queue_t * ) xQueueGenericCreate( uxMutexLength, uxMutexSize, ucQueueType );
prvInitialiseMutex( pxNewQueue );
return pxNewQueue;
}
static void prvInitialiseMutex( Queue_t *pxNewQueue )
{
if( pxNewQueue != NULL )
{
//实际是在Mutex情况下,将Queue_t的pcTail和pcHead赋予了新的意义
pxNewQueue->pxMutexHolder = NULL;
pxNewQueue->uxQueueType = queueQUEUE_IS_MUTEX;
//用于Recursive Mutex
pxNewQueue->u.uxRecursiveCallCount = 0;
//这里相当于先释放了Mutex,即使用Mutex第一次就可以获取资源,区别于Binary Semaphore
( void ) xQueueGenericSend( pxNewQueue, NULL, ( TickType_t ) 0U, queueSEND_TO_BACK );
}
}
通过Mutex和Binary Semaphore的初始化源码可以看出,在使用上Mutex创建完成后,可以直接获得资源,然后用完了再释放;而Binary Semaphore不同,创建完成后不能直接获取到,需要先释放再获取。
Recursive Mutex的创建函数xSemaphoreCreateRecursiveMutex(),实际与Mutex初始化相同,只是一个类型的区别queueQUEUE_TYPE_RECURSIVE_MUTEX,默认FreeRTOS不打开此功能。
#define xSemaphoreCreateRecursiveMutex() xQueueCreateMutex( queueQUEUE_TYPE_RECURSIVE_MUTEX )
接着看Semaphore和Mutex的Take和Give,其中Binary Semaphore/Semaphore/Mutex的API相同,Recursive Mutex有单独的API
//Take操作就是Queue的出队操作
#define xSemaphoreTake( xSemaphore, xBlockTime )
xQueueGenericReceive( ( QueueHandle_t ) ( xSemaphore ), NULL, ( xBlockTime ), pdFALSE )
//特别注意Mutex不能在中断中使用,因此这个API只适用于Semaphore
#define xSemaphoreTakeFromISR( xSemaphore, pxHigherPriorityTaskWoken )
xQueueReceiveFromISR( ( QueueHandle_t ) ( xSemaphore ), NULL, ( pxHigherPriorityTaskWoken ) )
//Give操作就是Queue的入队操作
#define xSemaphoreGive(xSemaphore)
xQueueGenericSend( ( QueueHandle_t ) ( xSemaphore ), NULL, semGIVE_BLOCK_TIME, queueSEND_TO_BACK )
//特别注意Mutex不能在中断中使用,因此这个API只适用于Semaphore
#define xSemaphoreGiveFromISR( xSemaphore, pxHigherPriorityTaskWoken )
xQueueGiveFromISR( ( QueueHandle_t ) ( xSemaphore ), ( pxHigherPriorityTaskWoken ) )
Give操作就是Queue的入队操作,队列满了就返回满错误;未满则入队,计算加1,判断是否有任务阻塞,如果有则任务调度。Take操作就是Queue的出队操作,队列不为空,则计数减1,判断是否有任务入队阻塞,如果有则任务调度;队列为空,阻塞等待时间为0,则直接返回空错误;队列为空,阻塞等待时间不为0,则任务阻塞,并将任务加入延时列表。特别注意Mutex不能在中断处理函数中操作。
Recursive Mutex的Take和Give的API区别于其他3个
#define xSemaphoreTakeRecursive( xMutex, xBlockTime )
xQueueTakeMutexRecursive( ( xMutex ), ( xBlockTime ) )
BaseType_t xQueueTakeMutexRecursive( QueueHandle_t xMutex, TickType_t xTicksToWait )
{
BaseType_t xReturn;
Queue_t * const pxMutex = ( Queue_t * ) xMutex;
if( pxMutex->pxMutexHolder == ( void * ) xTaskGetCurrentTaskHandle() )
{
//非第一次调用此API,此时pxMutexHolder与当前task的TCB相同,直接uxRecursiveCallCount加1,不用去操作队列函数;如果此时是另一个任务Take,则会到下面的分支阻塞在xQueueGenericReceive
//同一个任务只要递归Mutex没有将所有Take的次数Give掉,就直接进入这个分支;同一个任务一旦Give掉所有的Take次数,pxMutexHolder置为NULL,就会进入下面的分支,此时有其他任务想Take此Mutex会获得Take的机会
( pxMutex->u.uxRecursiveCallCount )++;
xReturn = pdPASS;
}
else
{
//如果第一次调用此API去Take递归Mutex,将当前Task的TCB赋值给pxMutexHolder,然后将uxRecursiveCallCount加1
//如果递归Mutex的Give所有Take的次数,将pxMutexHolder置为NULL,则又进入到这个分支,如果此时有其他任务Take递归Mutex,则会获得机会,否则只能被阻塞在xQueueGenericReceive
xReturn = xQueueGenericReceive( pxMutex, NULL, xTicksToWait, pdFALSE );
if( xReturn != pdFAIL )
{
( pxMutex->u.uxRecursiveCallCount )++;
}
}
return xReturn;
}
#define xSemaphoreGiveRecursive( xMutex )
xQueueGiveMutexRecursive( ( xMutex ) )
BaseType_t xQueueGiveMutexRecursive( QueueHandle_t xMutex )
{
BaseType_t xReturn;
Queue_t * const pxMutex = ( Queue_t * ) xMutex;
//判断是否在同一个任务中Give
if( pxMutex->pxMutexHolder == ( void * ) xTaskGetCurrentTaskHandle() )
{
//通过uxRecursiveCallCount计数递归,每次Give操作此值减1
( pxMutex->u.uxRecursiveCallCount )--;
if( pxMutex->u.uxRecursiveCallCount == ( UBaseType_t ) 0 )
{
//如果Give的次数刚好与Take的次数相等,向pxMutex队列里发送一条消息,pxMutexHolder置为NULL,这样Give次数过多就不会再走进这个分支,而是直接返回错误;另外如果有其他任务需要Take递归Mutex,则获得机会,即释放了递归Mutex
( void ) xQueueGenericSend( pxMutex, NULL, queueMUTEX_GIVE_BLOCK_TIME, queueSEND_TO_BACK );
}
xReturn = pdPASS;
}
else
{
//如果不在同一个任务中直接返回错误,还有Give的次数超过了Take的次数也会走到这里
xReturn = pdFAIL;
}
return xReturn;
}
由上面的源码可以看出,Mutex需要在同一个任务中获取释放,作为资源共享锁的使用方式,pxMutexHolder会记录创建Mutex时的task TCB,Take和Give时都会判断是否是在同一个task中,如果不是直接返回错误。而Binary Semaphore没有优先级继承,而且可以在任意的任务中获取释放。
Mutex具有优先级继承,主要用作资源共享时,提升当前获得Mutex的任务的优先级至等待此资源的所有任务中的最高优先级,尽最大可能的避免优先级翻转造成的危害(高优先级任务一直得不到资源一直被挂起,或者直接死锁了)。
可以看出,Semaphore和Mutex都是使用Queue实现的,只用到了Queue的头部分,即Queue_t结构体,而Queue的队列项则为空。Binary Semaphore/Semaphore/Mutex/Recursive Mutex各有自己的创建API,最终都是调用的Queue的创建函数;Binary Semaphore/Semaphore/Mutex的Take和Give操作API相同,Recursive Mutex有自己的单独的API操作;Semaphore有中断相关的API,但是Mutex不能在中断处理程序中执行,Mutex具有优先级继承,而且必须在同一个任务中Take和Give,而Semaphore没有优先级继承,可以在任意的任务中Take,然后在任意的任务中Give,或者反过来操作。
Task Notifications
Task Notifications是FreeRTOS V8.2.0之后新增的功能,官方文档结论是比Queue/Semaphore/Mutex/Event Groups更快,使用RAM更少,可以携带长度为1的消息内容,完全基于Task实现。
Task TCB数据结构里相关的定义如下:
typedef struct tskTaskControlBlock
{
...
#if( configUSE_TASK_NOTIFICATIONS == 1 )
volatile uint32_t ulNotifiedValue;
volatile uint8_t ucNotifyState;
#endif
...
} tskTCB;
Task Notifications的发送通知函数xTaskGenericNotify()
typedef enum
{
eNoAction = 0, //发送通知但不使用ulValue值,无通知内容
eSetBits, //被通知的任务的通知值按bit或ulValue
eIncrement, //被通知的任务的通知值加1
eSetValueWithOverwrite, //被通知任务的通知值直接设置成ulValue,无论之前的通知值是否已经被读取
eSetValueWithoutOverwrite //之前的任务通知值被读取后,再更新被通知任务的通知值,如果没有读取则丢弃当前的ulValue
} eNotifyAction;
BaseType_t xTaskGenericNotify(...)
{
TCB_t * pxTCB;
BaseType_t xReturn = pdPASS;
uint8_t ucOriginalNotifyState;
pxTCB = ( TCB_t * ) xTaskToNotify;
taskENTER_CRITICAL();
{
if( pulPreviousNotificationValue != NULL )
{
//函数传入的参数,将ulNotifiedValue更新前的值赋值给这个传入参数,发送通知的task获得更新前的通知值
*pulPreviousNotificationValue = pxTCB->ulNotifiedValue;
}
//保存ucNotifyState
ucOriginalNotifyState = pxTCB->ucNotifyState;
//更新ucNotifyState
pxTCB->ucNotifyState = taskNOTIFICATION_RECEIVED;
//更新通知的方法,详见eNotifyAction枚举定义
switch( eAction )
{
case eSetBits :
pxTCB->ulNotifiedValue |= ulValue;
break;
case eIncrement :
( pxTCB->ulNotifiedValue )++;
break;
case eSetValueWithOverwrite :
pxTCB->ulNotifiedValue = ulValue;
break;
case eSetValueWithoutOverwrite :
if( ucOriginalNotifyState != taskNOTIFICATION_RECEIVED )
{
pxTCB->ulNotifiedValue = ulValue;
}
else
{
xReturn = pdFAIL;
}
break;
case eNoAction:
break;
}
if( ucOriginalNotifyState == taskWAITING_NOTIFICATION )
{
//被通知的任务正好在等待通知的状态,则将其添加到任务Ready List
( void ) uxListRemove( &( pxTCB->xStateListItem ) );
prvAddTaskToReadyList( pxTCB );
#if( configUSE_TICKLESS_IDLE != 0 )
{
prvResetNextTaskUnblockTime();
}
#endif
if( pxTCB->uxPriority > pxCurrentTCB->uxPriority )
{
//如果发现等待通知的任务优先级更高,则触发一次任务调度
taskYIELD_IF_USING_PREEMPTION();
}
}
taskEXIT_CRITICAL();
return xReturn;
}
从上面的源码可以看出任务通知的机制非常简洁,与任务本身相关,将相关的信息填写到任务TCB之后,判断等待通知的任务优先级是否更高,如果更高则直接触发一次任务调度。由此,可以理解任务只能等待在一个任务通知上,也可以获得长度为1的消息内容,这也有别于Semaphore/Queue等方式,但是简洁高效是其最大的特点,在某些场景下可以使用此方式。
中断处理函数里的任务通知函数与非中断保护的函数类似,只是增加了开关中断保护;而等待任务通知不能在中断中执行,等待通知函数ulTaskNotifyTake()和xTaskNotifyWait(),直接看xTaskNotifyWait()
BaseType_t xTaskNotifyWait(...)
{
BaseType_t xReturn;
taskENTER_CRITICAL();
{
//如果任务没有收到通知
if( pxCurrentTCB->ucNotifyState != taskNOTIFICATION_RECEIVED )
{
pxCurrentTCB->ulNotifiedValue &= ~ulBitsToClearOnEntry;
//将任务状态设置为等待通知状态
pxCurrentTCB->ucNotifyState = taskWAITING_NOTIFICATION;
if( xTicksToWait > ( TickType_t ) 0 )
{
//如果设置了阻塞等待超时时间,则将任务加入Delay List
prvAddCurrentTaskToDelayedList( xTicksToWait, pdTRUE );
//触发任务调度
portYIELD_WITHIN_API();
}
}
}
taskEXIT_CRITICAL();
//退出临界区,如果有任务调度,则任务被挂起
taskENTER_CRITICAL();
{
if( pulNotificationValue != NULL )
{
//通知值赋值给函数传入参数,返回给调用者
*pulNotificationValue = pxCurrentTCB->ulNotifiedValue;
}
if( pxCurrentTCB->ucNotifyState == taskWAITING_NOTIFICATION )
{
//没有收到通知值,可能是阻塞等待超时或者阻塞等待超时为0,直接返回错误
xReturn = pdFALSE;
}
else
{
//收到了通知
pxCurrentTCB->ulNotifiedValue &= ~ulBitsToClearOnExit;
xReturn = pdTRUE;
}
//重置状态为非等待通知状态
pxCurrentTCB->ucNotifyState = taskNOT_WAITING_NOTIFICATION;
}
taskEXIT_CRITICAL();
}
Task Notifications基本就阅读完成了,简洁高效而且占用RAM少,可以实现轻量级Queue,Binary Semaphore, Semaphore和Event Groups,具有很高的效率优势,但是也要注意使用限制,只能有1个任务接收通知,发送通知的任务不能因为无法发送通知而进入阻塞状态。